/ 01
Intelligent Chassis
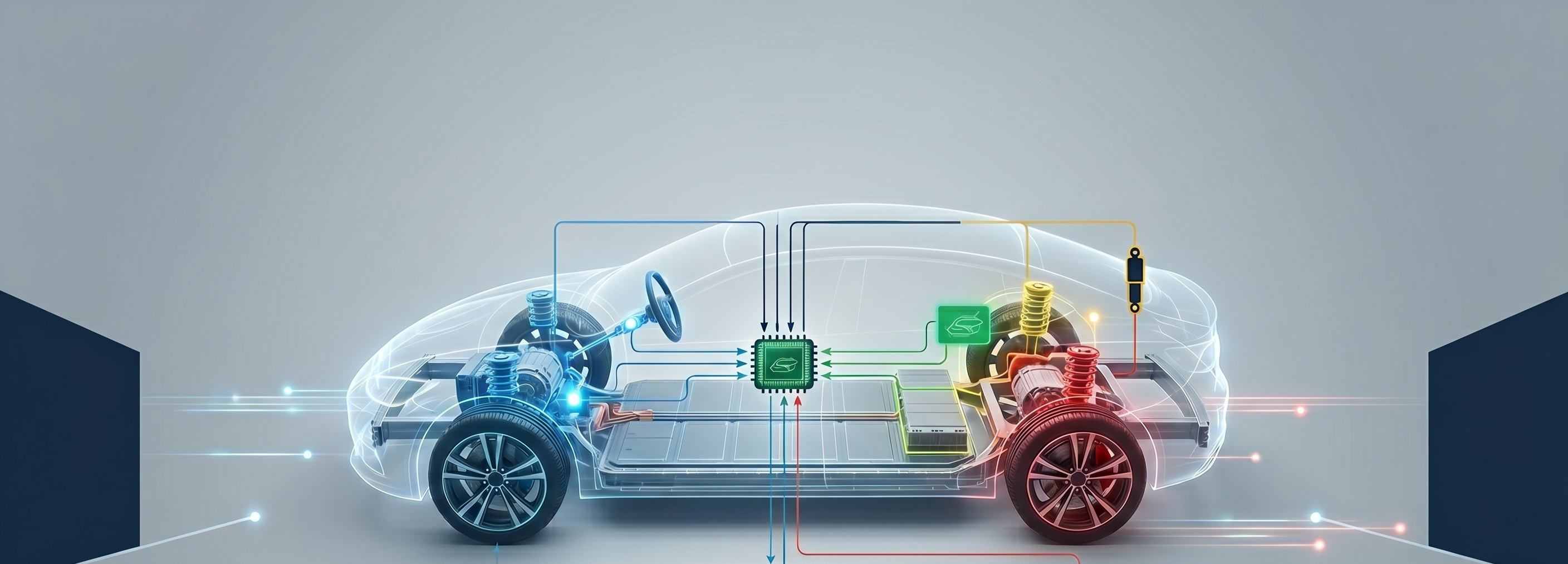
Intelligent Chassis coordinates braking, steering, and suspension under a unified control architecture. ESC, EPS, ASR, and semi/full-active damper controls stop being separate black boxes and become agents speaking through a shared vehicle-state estimation layer. The result is predictable consistency in driving behaviour. Which system intervenes first during oversteer, which parameter set gets triggered, and how the driver experience is affected — all become part of one mathematical model.
- Unified lateral/vertical dynamics control architecture
- Yaw, roll, pitch, and heave control algorithms
- Coordinated arbitration with ESC, EPS, ASR
- Calibration in track, road, and low-traction scenarios
- OEM-specific driving character alignment
1 modelAll chassis systems

